
Home » MACHINE CONSTRUCTION
The completed project aimed to:
The project was executed using components from: KUKA, SIEMENS, FESTO, and MTA.
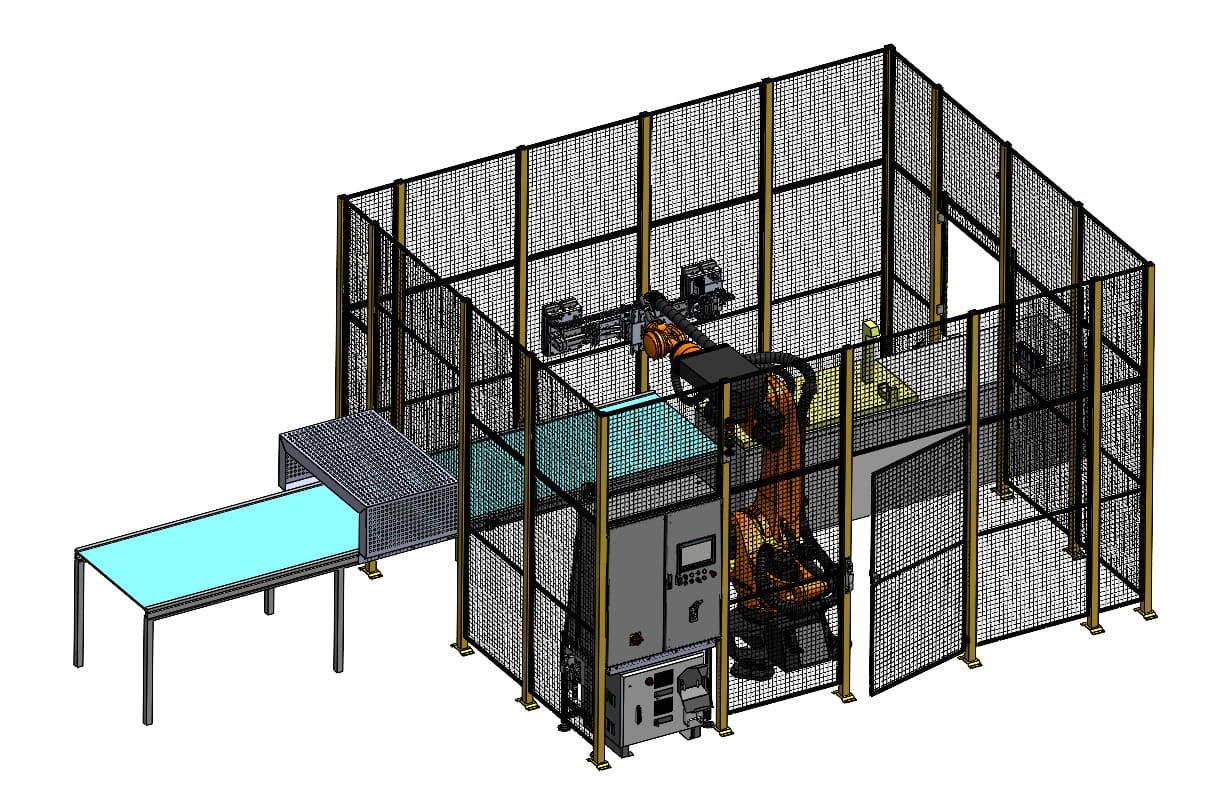
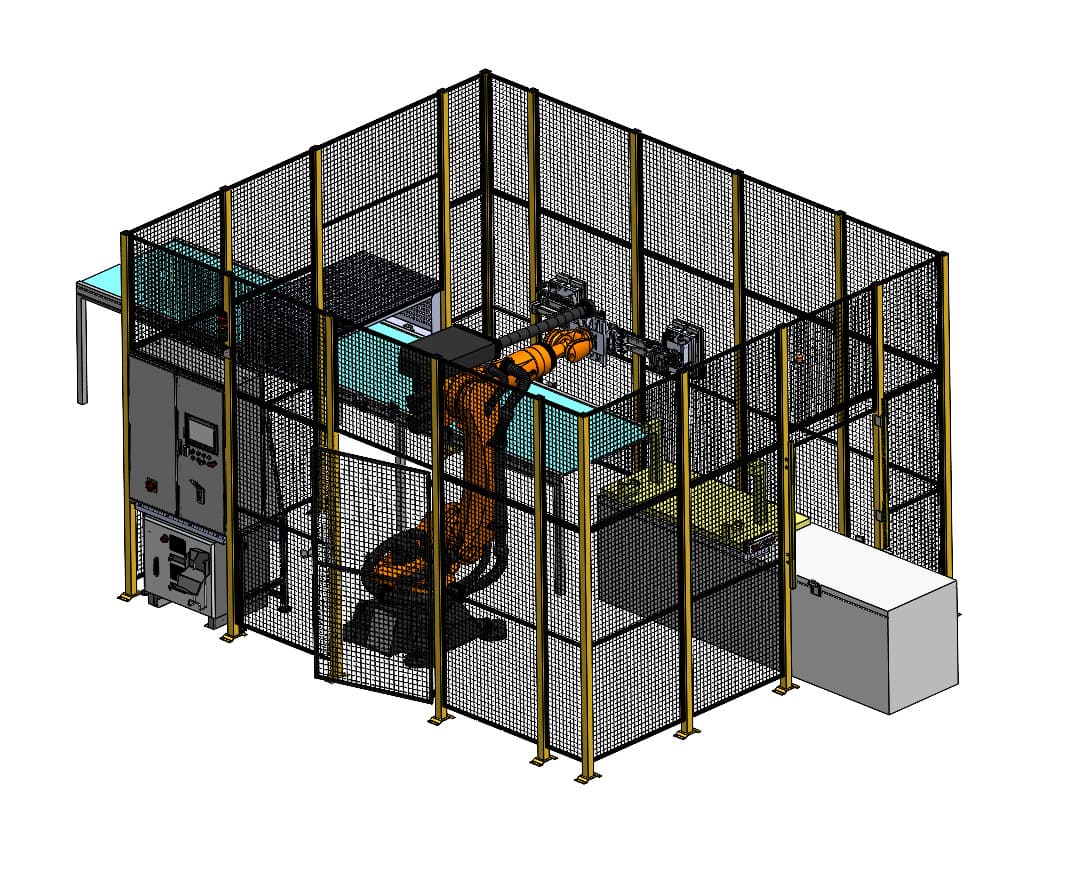
The robotized Emco E65SMY workstation was designed to automate the loading and unloading process of parts of various sizes.
Our company has already completed around 20 similar workstations.
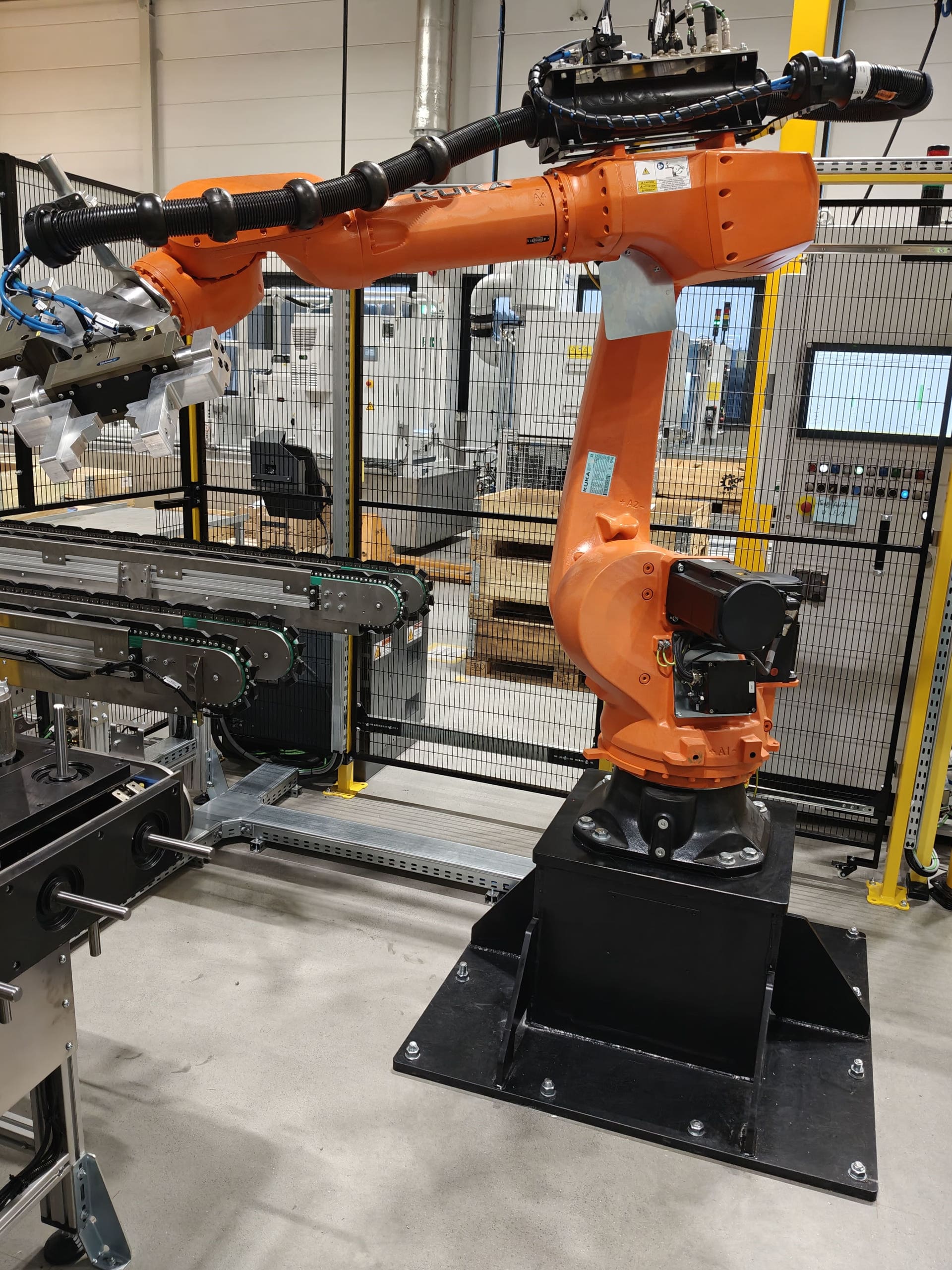
The central element of the system is the KUKA KR60L30 robot with a payload of 30 kg and a reach of 2429 mm, operating in a 6-axis configuration. It is equipped with control and an operator panel based on Siemens S7-1500, with a safety system built using PILZ and Euchner components.
The robot is equipped with two Schunk pneumatic grippers mounted in a V-configuration:
The robot is fitted with two Schunk pneumatic grippers in a V-layout, allowing the handling of parts weighing up to 10 kg and with lengths up to 282 mm.
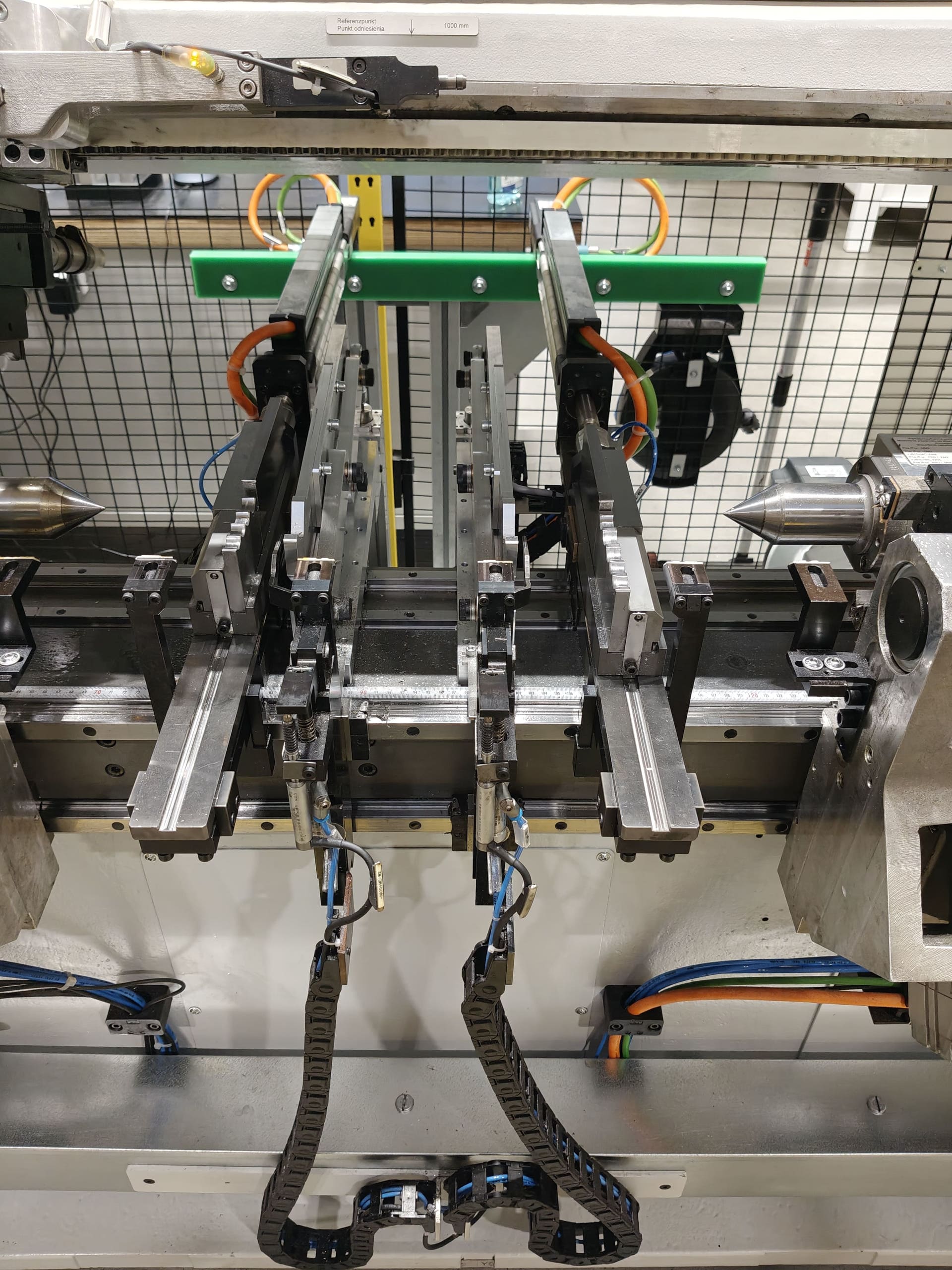
The part feeding system is based on a drawer feeder with two interchangeable drawers used alternately for loading and unloading. This design allows for quick changeovers and storage of up to 40 parts. Additionally, a separate drawer is provided for placing parts intended for measurement, activated by pressing a button.
During each pickup cycle, the part is cleaned of coolant residues by a cleaning brush, and an additional drawer allows placing parts for quality inspection.
The operating mode depends on the weight of the part:
The average cycle time is approximately 1 minute, and the workstation has been prepared to handle 4 part references. The entire system is secured with System-Tech fencing, ensuring full compliance with safety requirements.
We completed a comprehensive press loading station for NORD, including the design, construction, and integration of all equipment. The solution increases process efficiency, improves workplace safety, and enables the automation of key production stages. This is another MTA project where we combine modern technologies with a practical approach to our client’s needs.
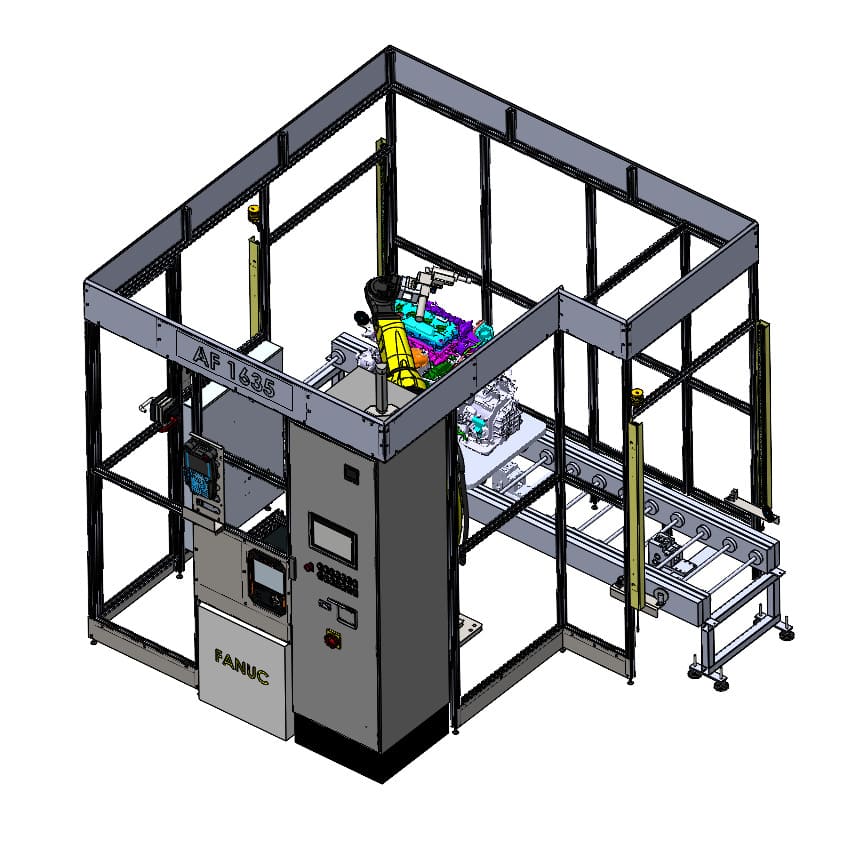
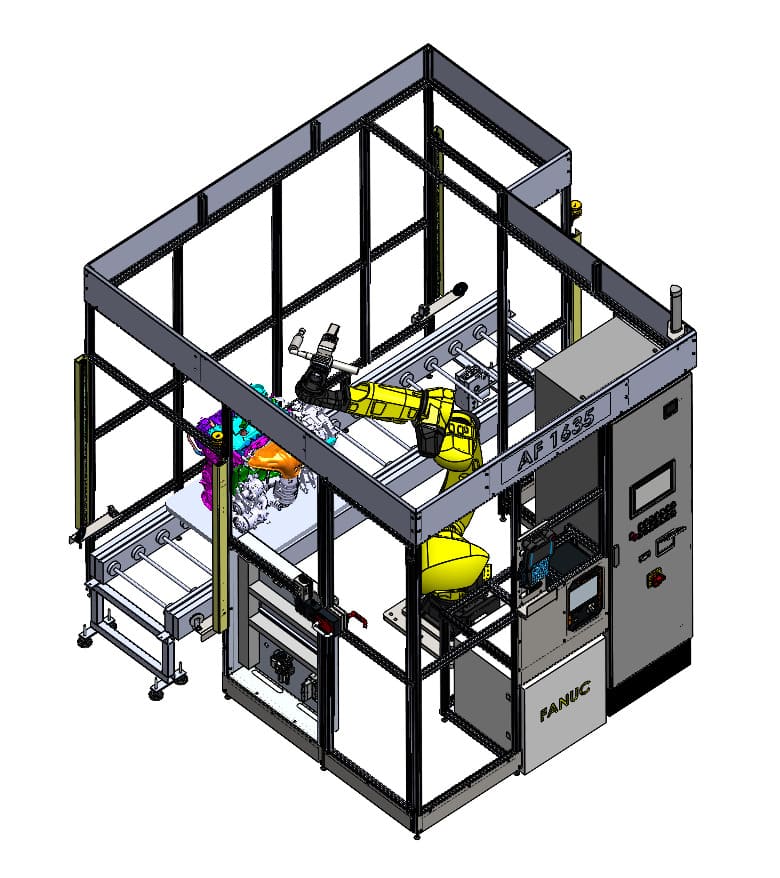
The project involves the design and construction of a fully robotized workstation dedicated to the automatic tightening of screws in car engine components. The system is based on the integration of a FANUC industrial robot with an advanced vision system and professional assembly tools.
A key role is played by the Cognex vision system, which detects the position of the screws in real time and analyzes their exact location in relation to the inspected component. Based on this data, the FANUC robot precisely moves to the identified points, ensuring repeatability and high accuracy throughout the process.
The screw-tightening operation is performed using Cleco’s modern screwdrivers, which ensure stable operation and allow for strict control of assembly parameters. Each stage of the tightening process is monitored — the system records both torque and angle values, enabling full verification of the screw joint quality.
The project involves the design and construction of a fully automated robotic workstation dedicated to transferring television receivers from a conveyor line. The pickup process is performed in continuous motion — so-called “on the fly” — without the need to stop the conveyor.
A key feature of the system is the implementation of advanced synchronization algorithms that allow the robot to precisely match the speed of the conveyor carrying the TVs. This enables the robot to safely and smoothly pick up the receiver in motion, eliminating downtime and significantly increasing production line efficiency.
The system uses a specialized vacuum gripper from Unigripper, based on modular suction mat technology, ensuring a stable and reliable grip of receivers of varying sizes. The gripper continuously monitors critical parameters such as part position and suction force, ensuring both process reliability and protection of delicate TV screens and the robotic system itself.
The project also incorporates advanced safety algorithms that oversee proper system operation. They ensure safe collaboration between the robot and human operators, as well as careful handling of products, minimizing the risk of damage and potential hazards in the production environment.
Modernization of a Production Line Consisting of Three Mechanical Presses with Automatic Part Transport
During the modernization process, the following tasks were completed:
The project was executed using components from:
SIEMENS, FESTO, SICK, PIZZATO.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}