Home » Budowa maszyn przemysłowych
Zrealizowany projekt miał na celu:
Realizacja projektu odbyła się na komponentach firm:
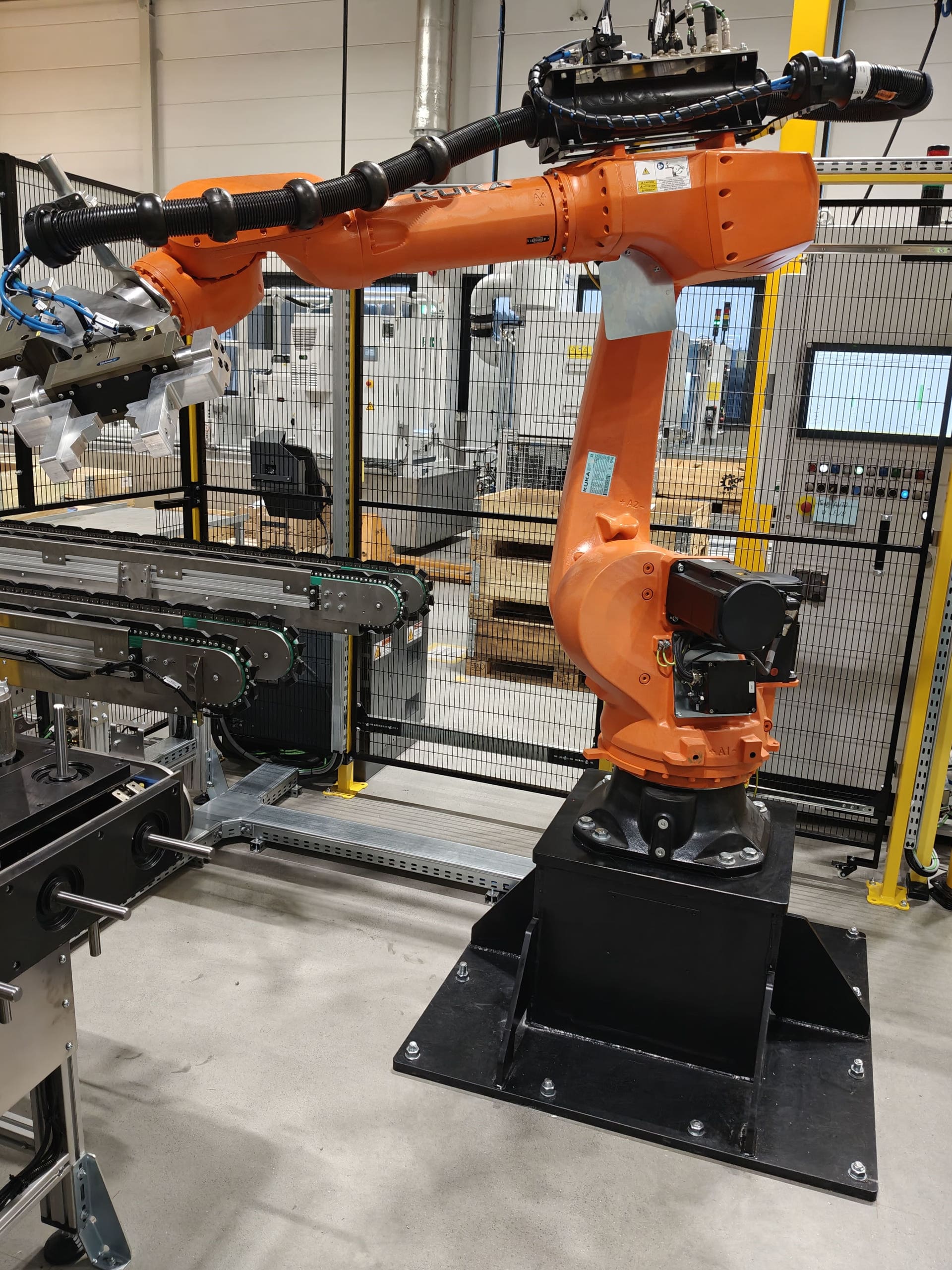
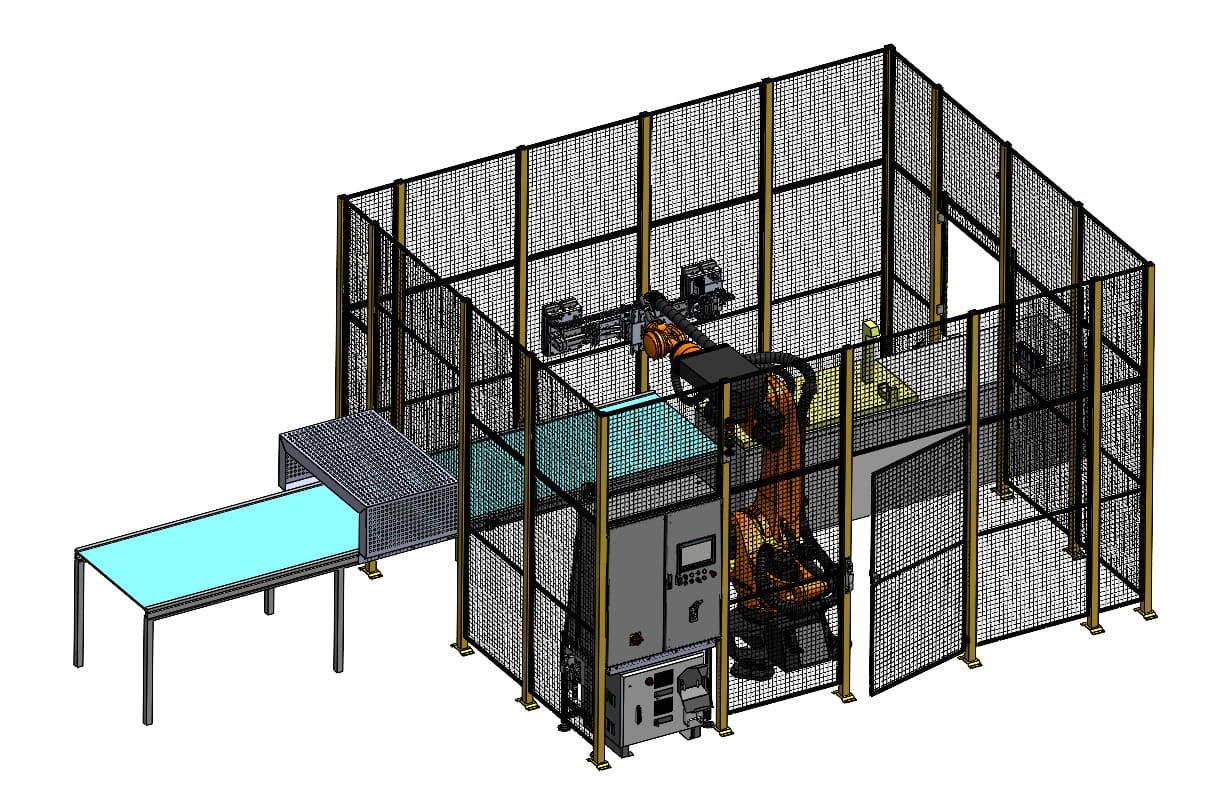
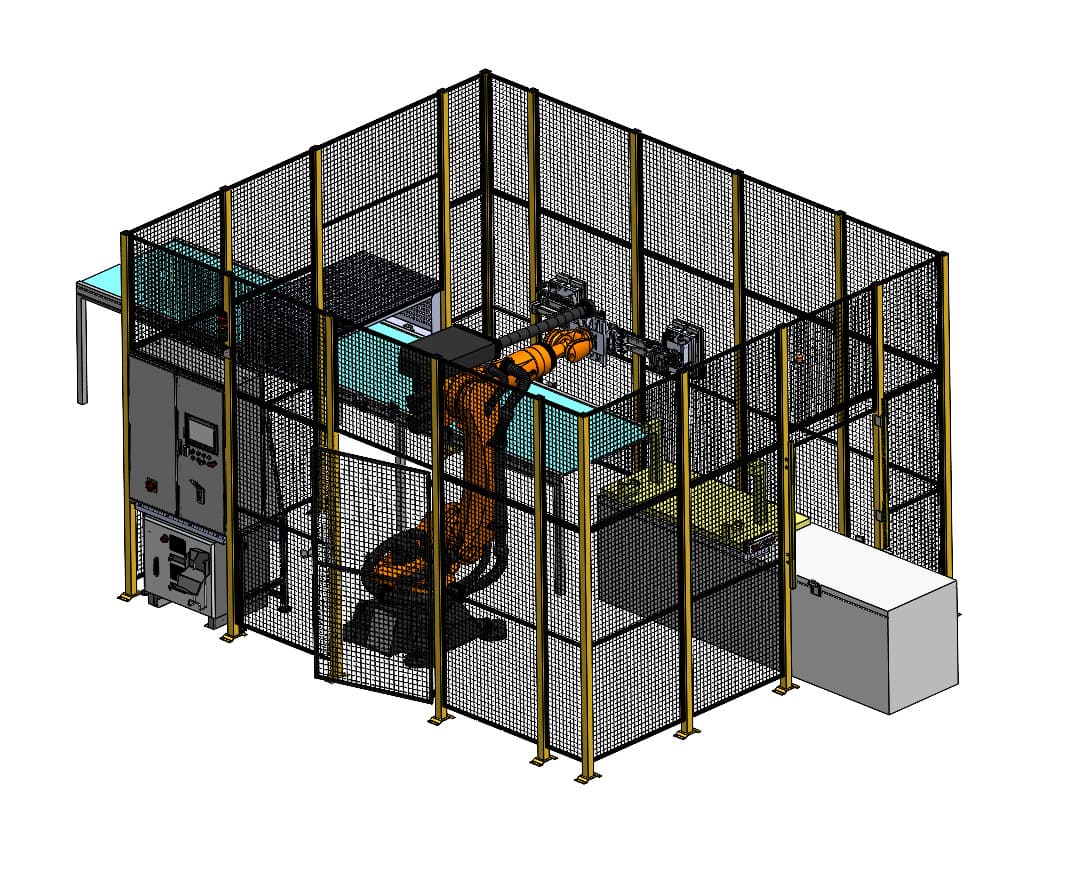
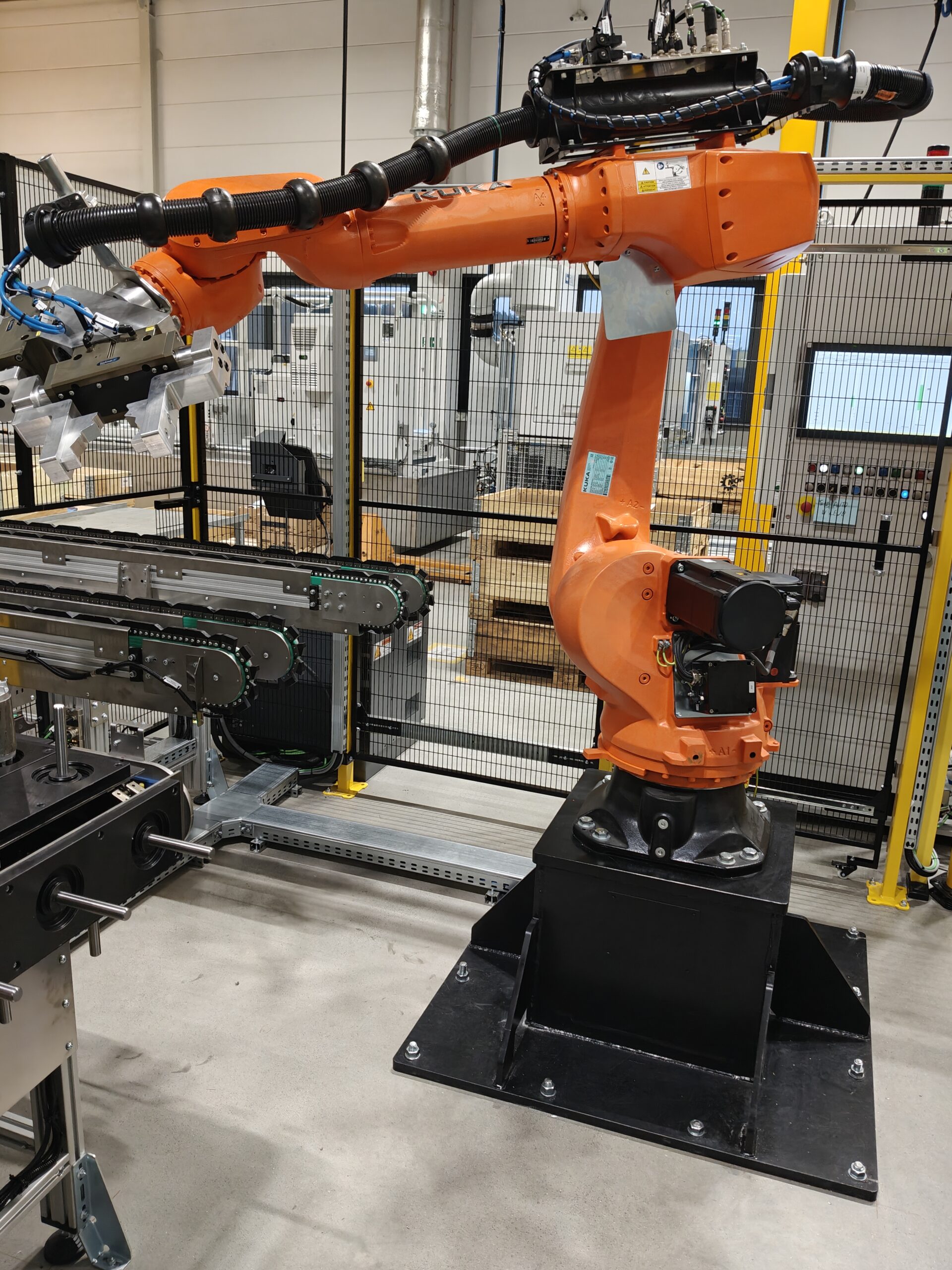
Zrobotyzowane stanowisko Emco E65SMY dla firmy NORD zostało zaprojektowane w celu automatyzacji procesu załadunku i rozładunku części o różnych gabarytach.
Nasza firma miała już okazję wykonać około 20 podobnych stanowisk.
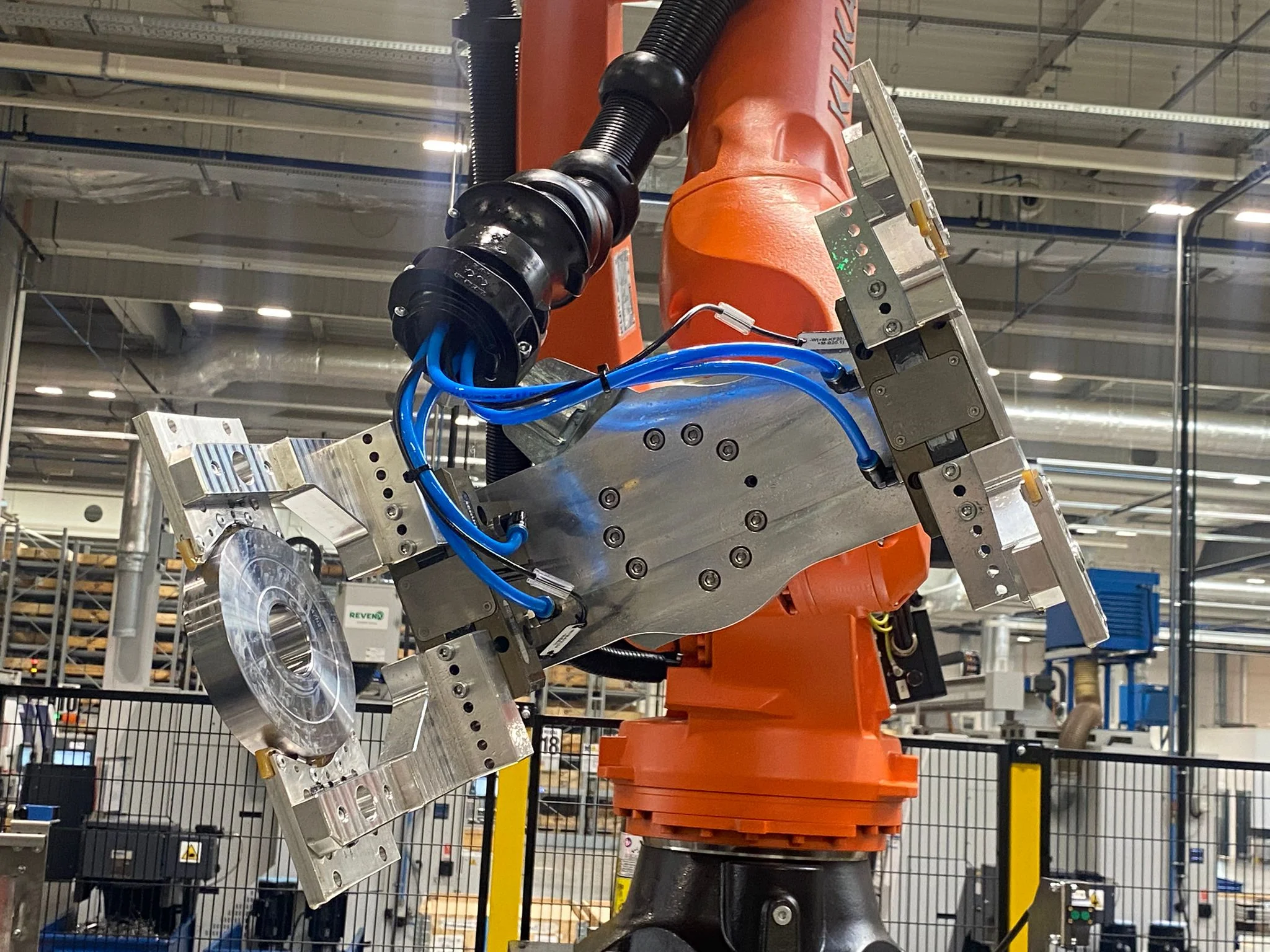
Centralnym elementem systemu jest robot KUKA KR60L30 o udźwigu 30 kg i zasięgu 2429 mm, pracujący w układzie 6-osiowym, wyposażony w sterowanie oraz pulpit operatorski sterowany przez Siemens S7-1500, z systemem bezpieczeństwa opartym na komponentach PILZ oraz Euchner.
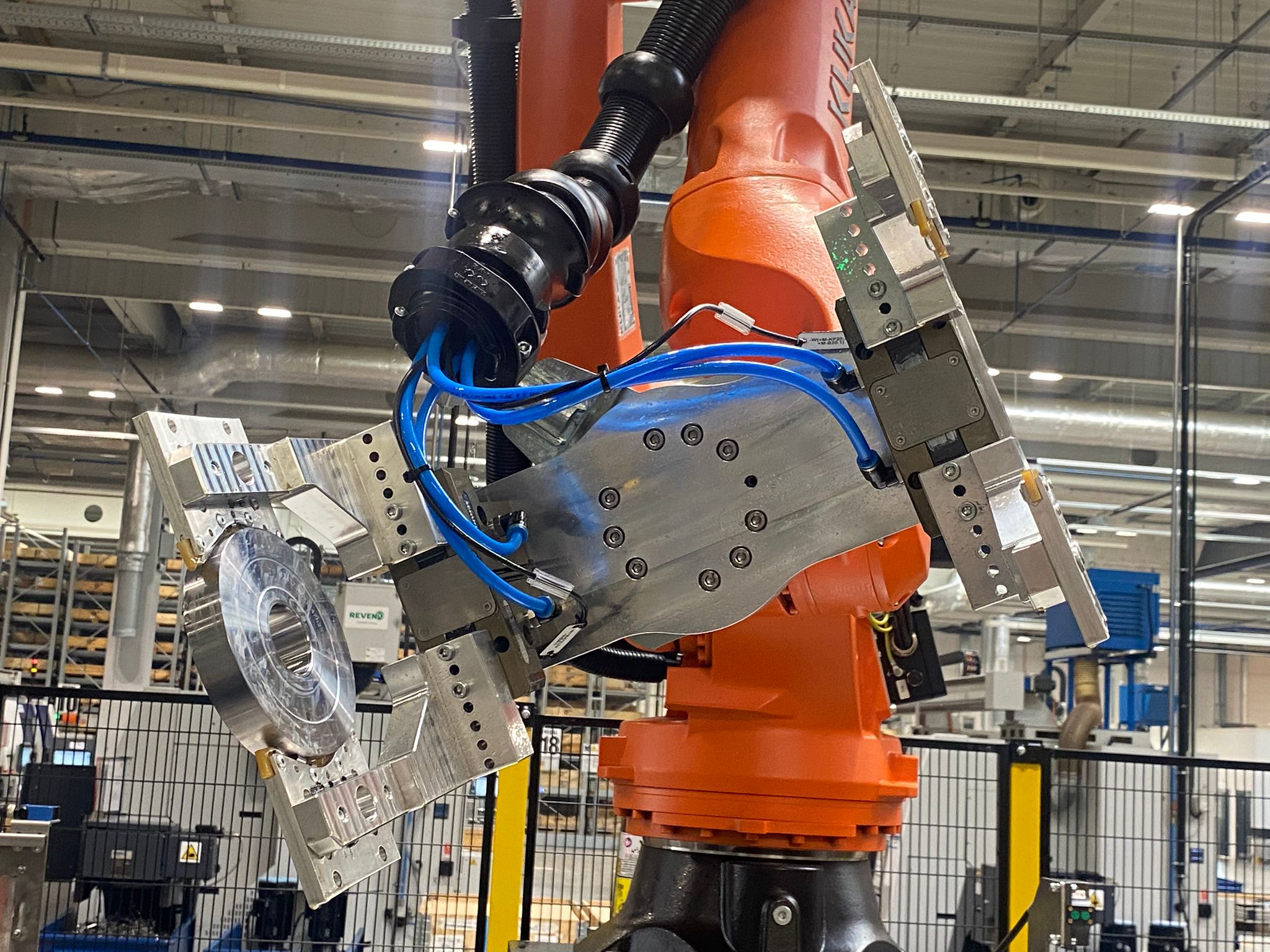
Robot wyposażony został w dwa pneumatyczne chwytaki firmy Schunk zamontowane w układzie V:
Robot wyposażono w dwa chwytaki pneumatyczne Schunk w układzie V, umożliwiające obsługę części do 10 kg i długości do 282 mm.
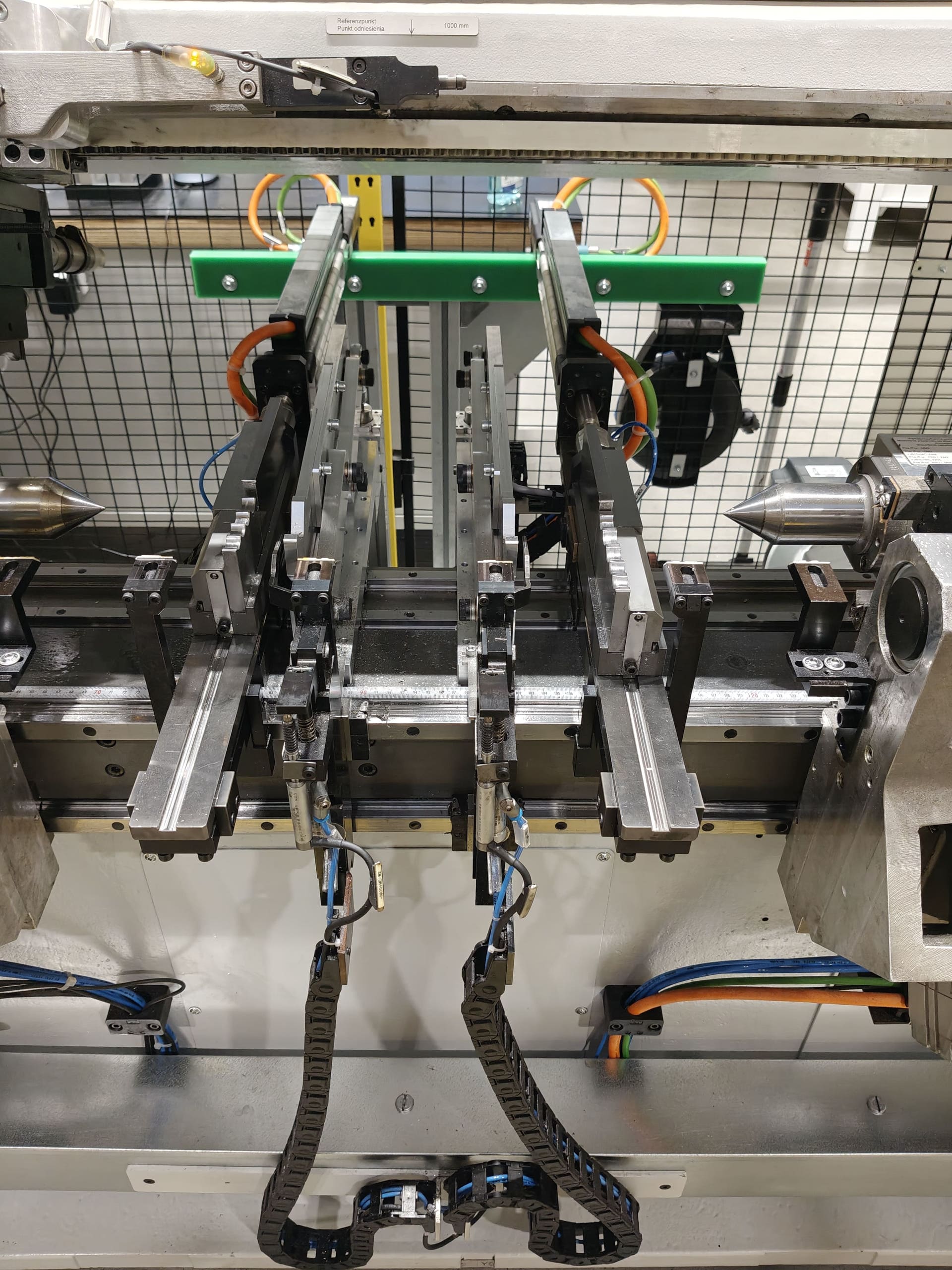
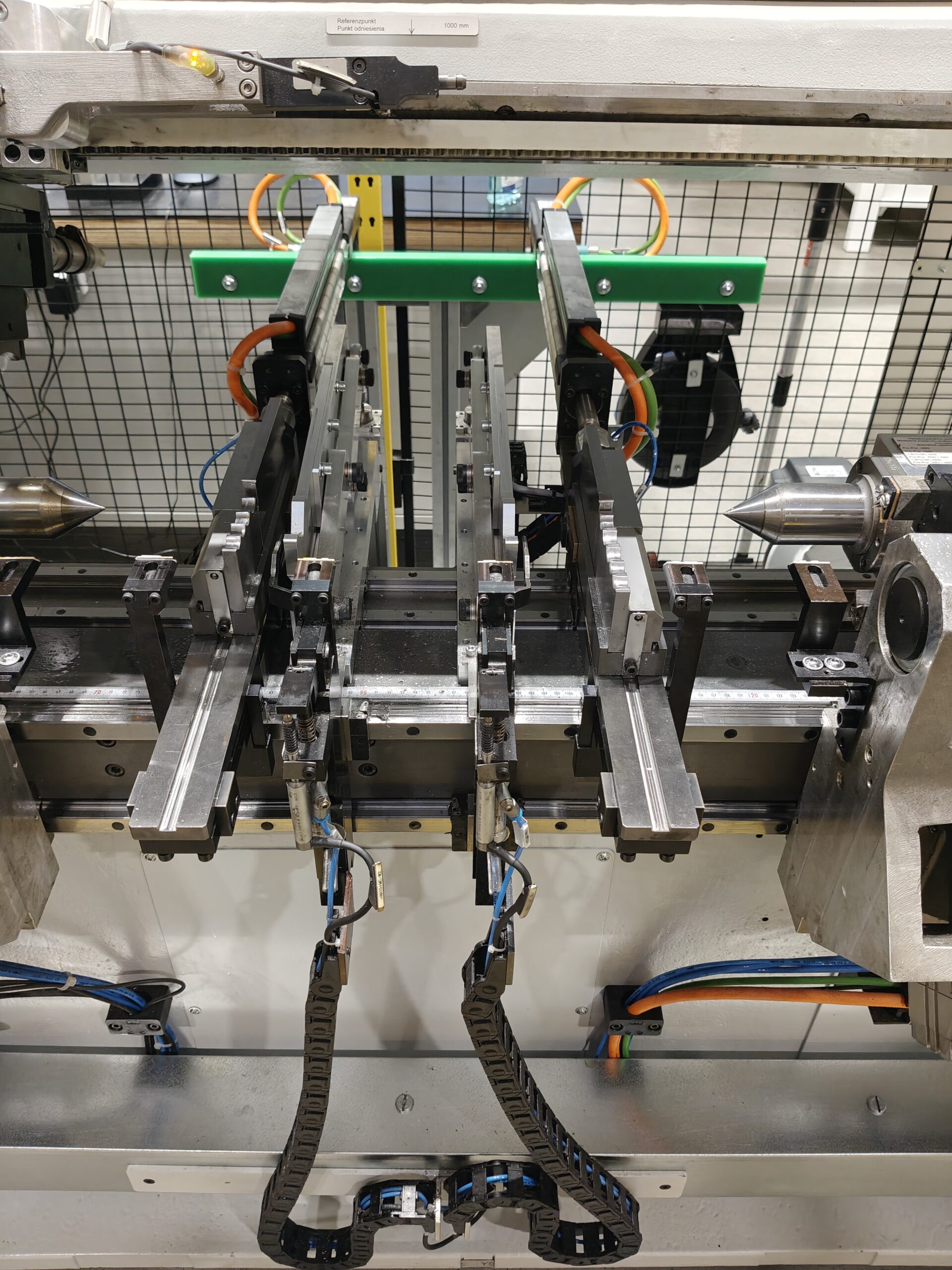
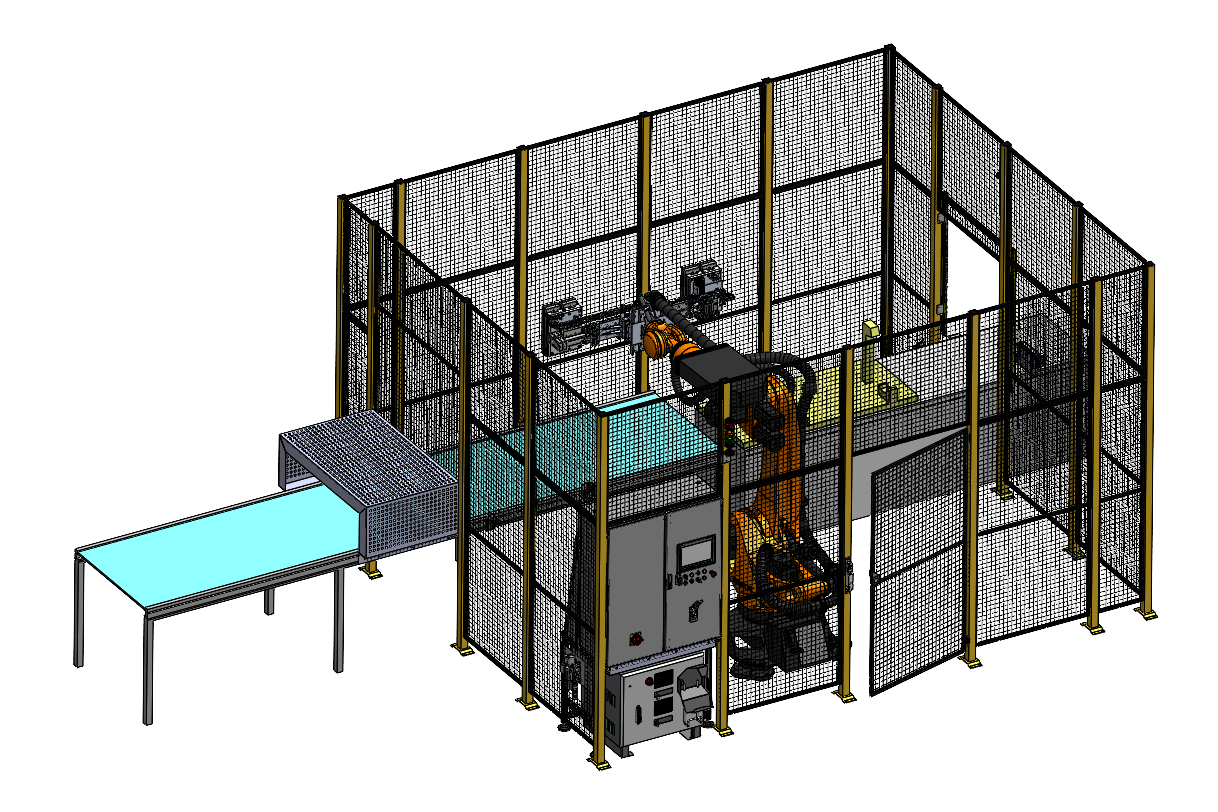
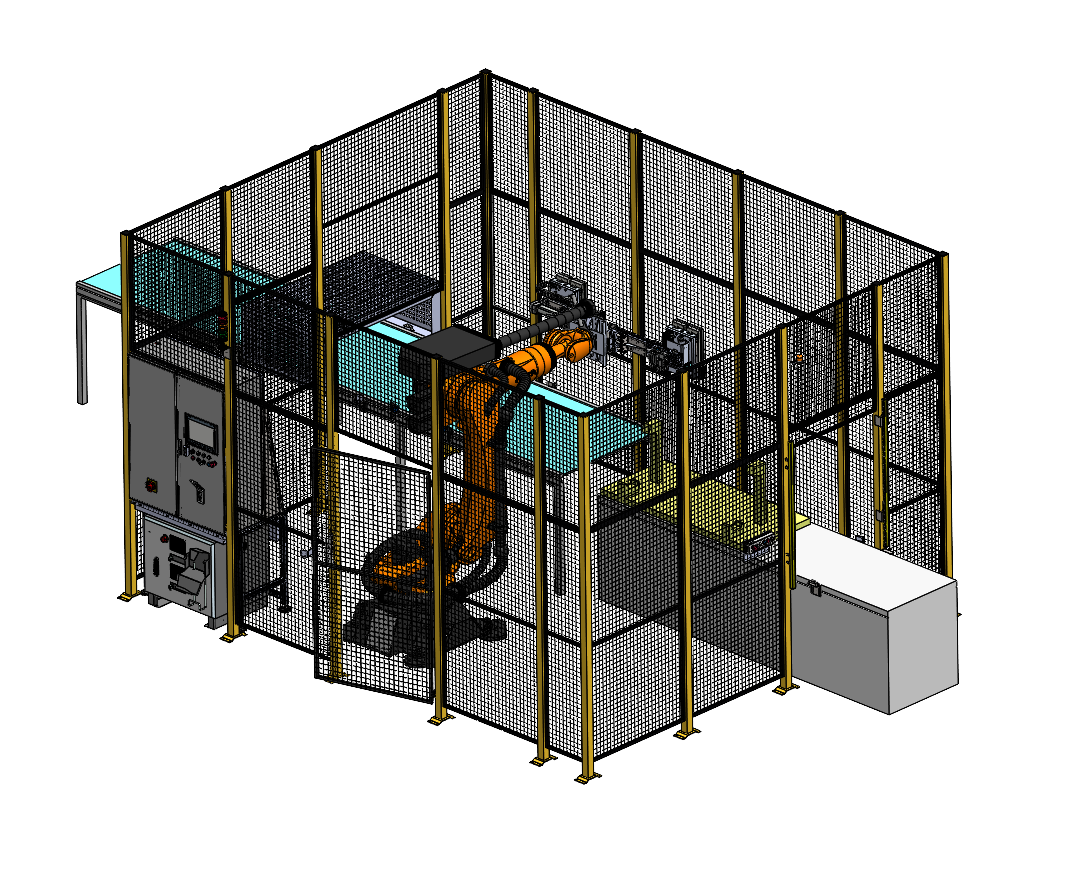
System podawania części oparto na podajniku szufladowym z dwiema wymiennymi szufladami, wykorzystywanymi naprzemiennie do procesu załadunku i rozładunku i pozwala na szybkie przezbrojenia oraz magazynowanie do 40 sztuk detali. Dodatkowo przewidziano osobną szufladę do odkładania części przeznaczonych do pomiaru, aktywowaną poprzez naciśnięcie przycisku.
W trakcie każdego cyklu odbioru część jest oczyszczana ze śladów emulsji przez szczotkę czyszczącą, a dodatkowa szuflada umożliwia odkładanie części do kontroli jakości.
Tryb pracy uzależniony jest od masy detalu:
Średni czas cyklu wynosi około 1 minuty, a stanowisko zostało przygotowane do obsługi 4 referencji detali. Całość zabezpieczono ogrodzeniem firmy System-Tech, zapewniającym pełną zgodność z wymaganiami bezpieczeństwa.
Dla firmy NORD wykonaliśmy kompletne stanowisko załadunku prasy, obejmujące projekt, budowę i integrację urządzeń. Rozwiązanie zwiększa wydajność procesu, poprawia bezpieczeństwo pracy i umożliwia automatyzację kluczowych etapów produkcji. To kolejna realizacja MTA, w której łączymy nowoczesne technologie z praktycznym podejściem do potrzeb klienta.
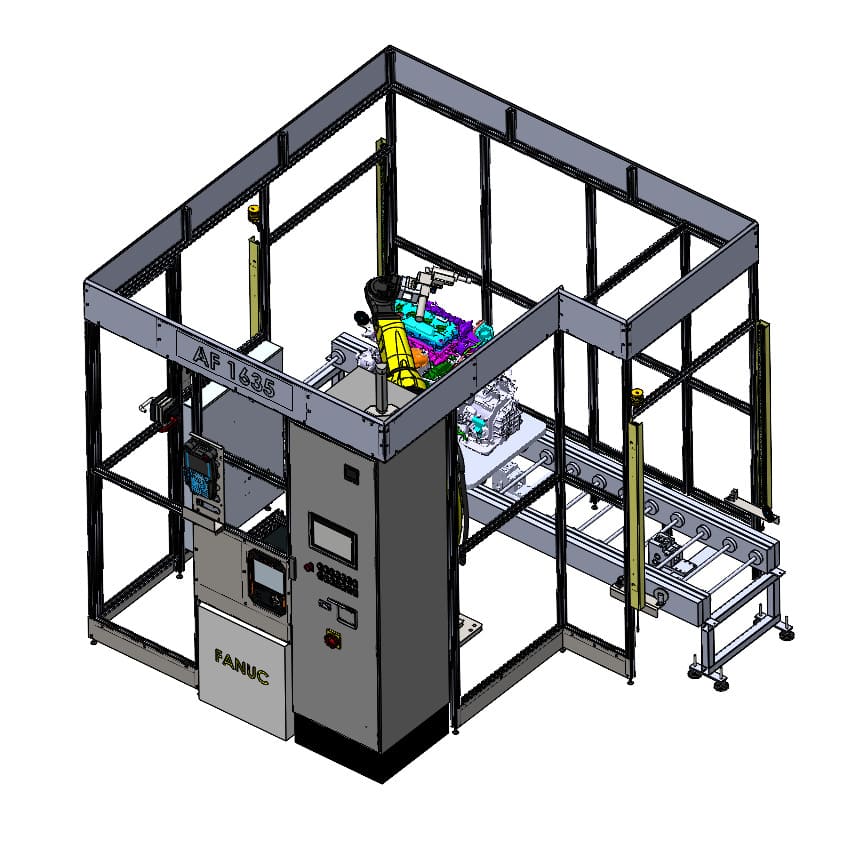
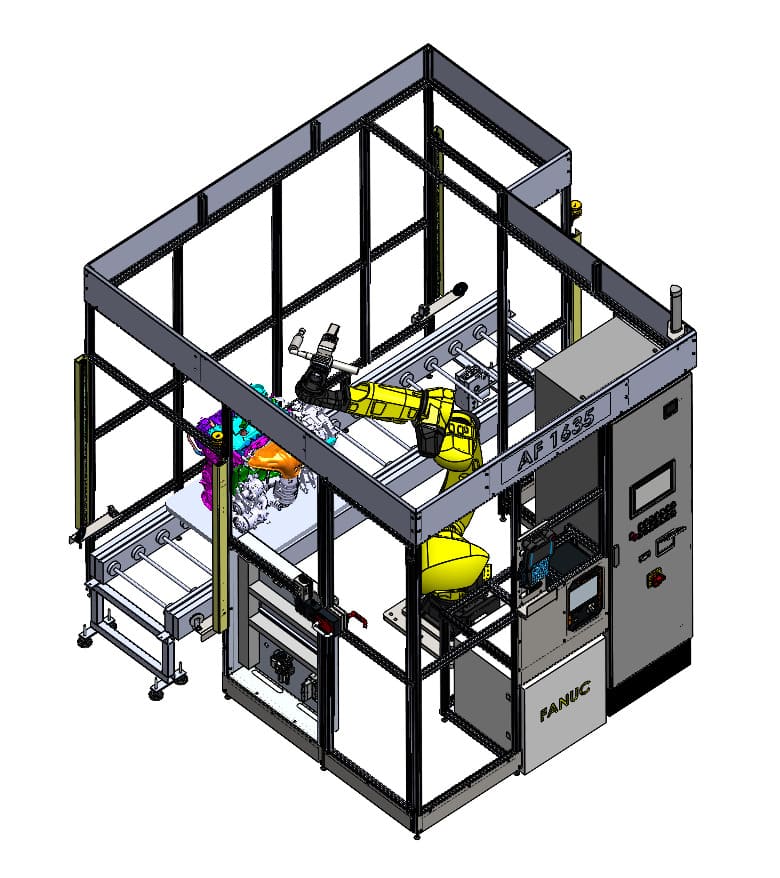
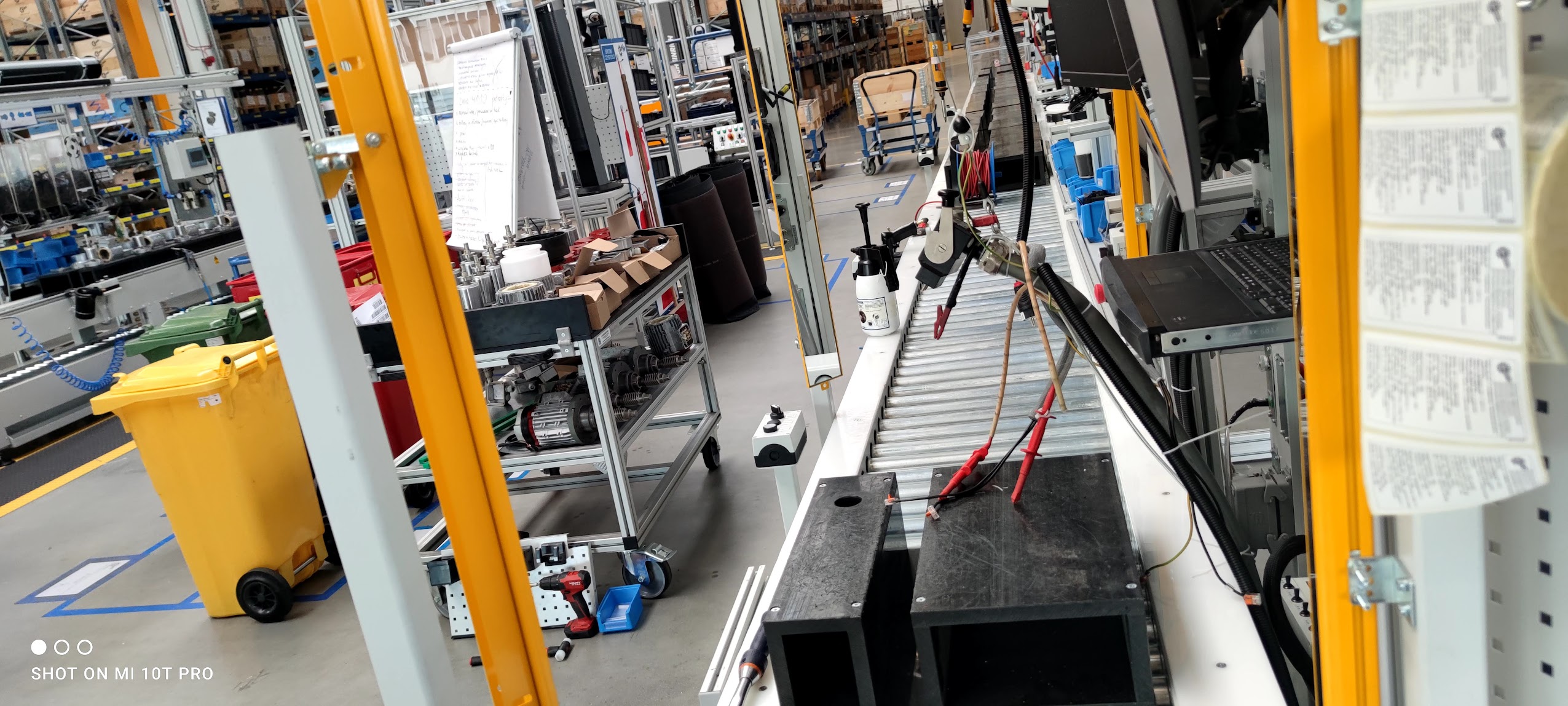
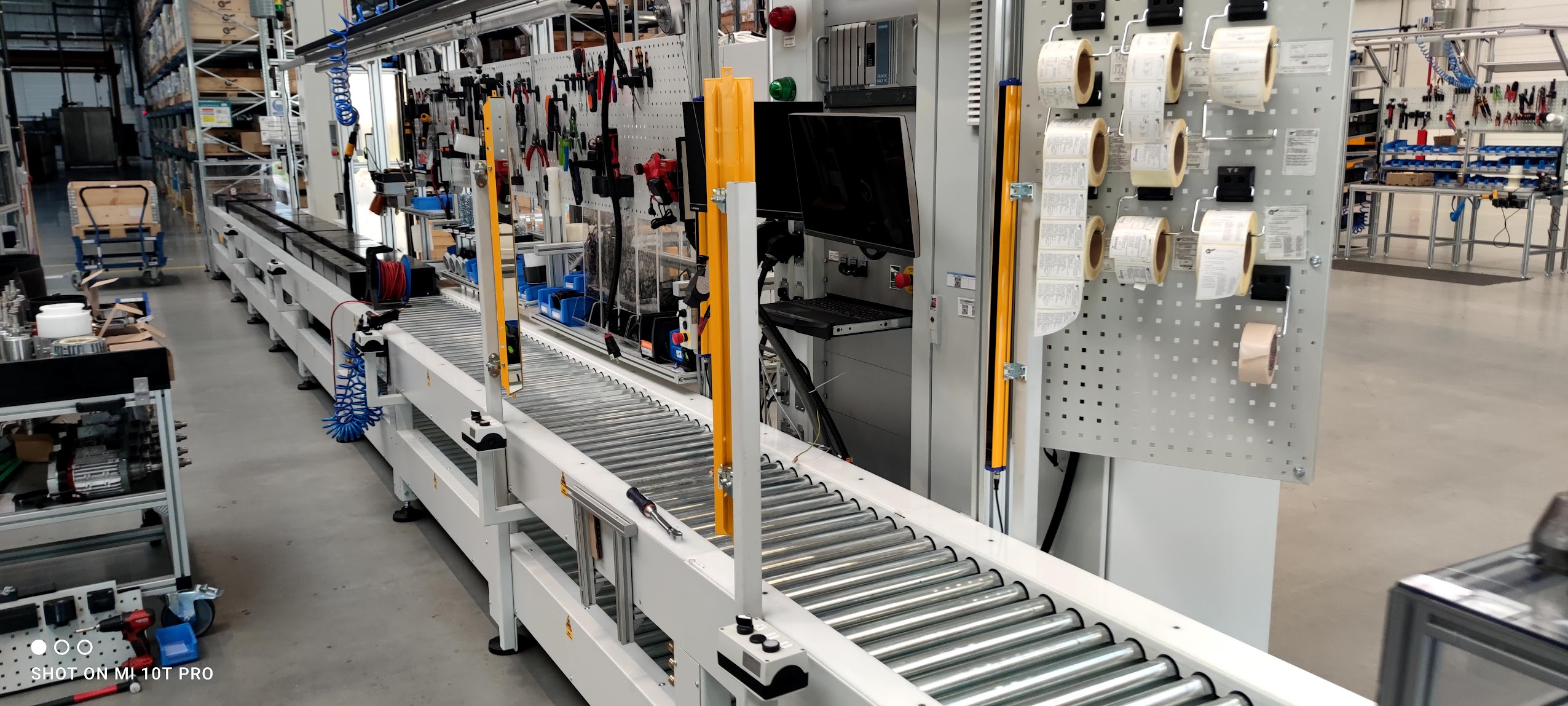
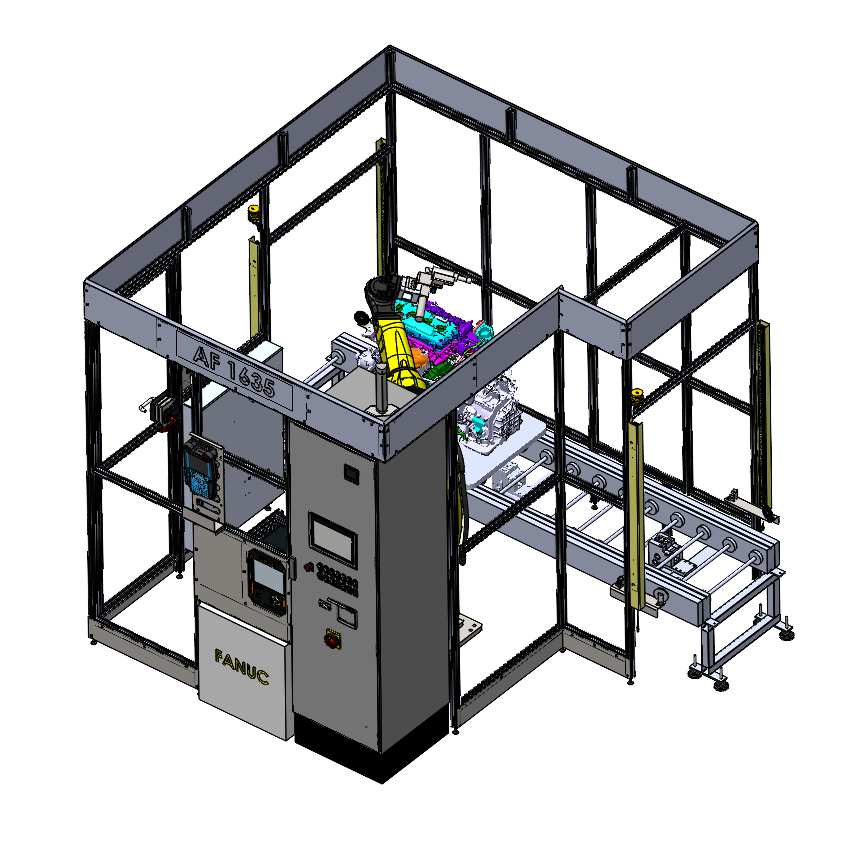
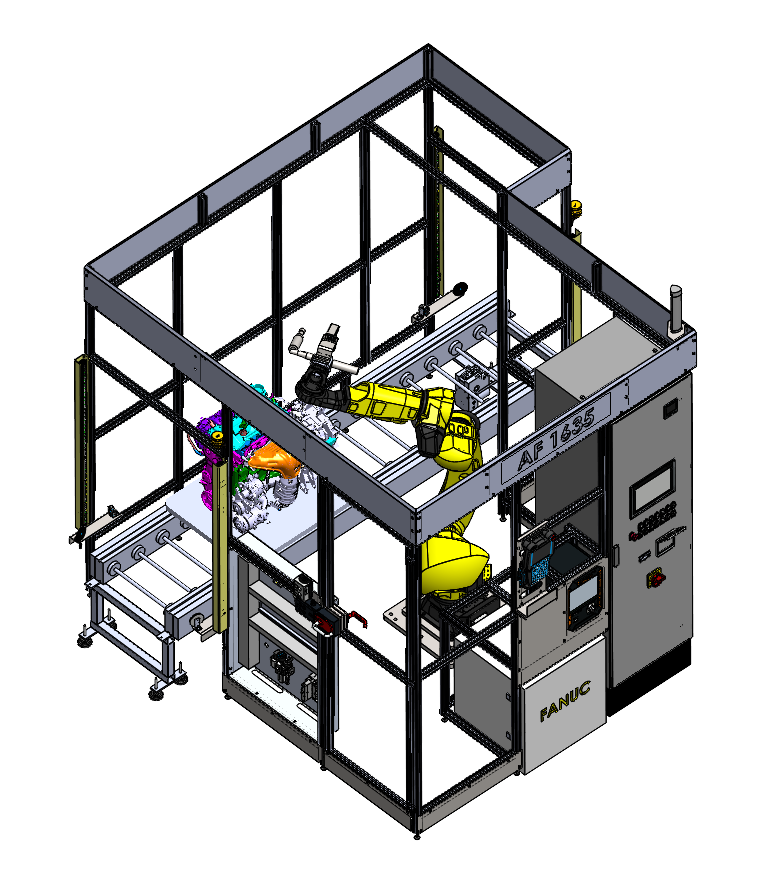
Projekt obejmuje zaprojektowanie i budowę w pełni zrobotyzowanego stanowiska przeznaczonego do automatycznego dokręcania śrub w elementach silników samochodowych. System oparty jest na współpracy robota przemysłowego FANUC z zaawansowanym układem wizyjnym i profesjonalnymi narzędziami montażowymi.
Kluczową rolę pełni system wizyjny firmy Cognex, który w czasie rzeczywistym wykrywa położenie śrub i analizuje ich dokładną lokalizację względem badanego detalu. Na podstawie tych informacji robot FANUC precyzyjnie dojeżdża do zidentyfikowanych punktów, co zapewnia powtarzalność i wysoką dokładność procesu.
Operacja wkręcania realizowana jest za pomocą nowoczesnych wkrętarek firmy Cleco, które gwarantują stabilną pracę oraz umożliwiają ścisłą kontrolę parametrów montażu. Każdy etap procesu dokręcania jest monitorowany – system rejestruje wartości momentu obrotowego i kąta dokręcenia, co pozwala na pełną weryfikację jakości połączenia śrubowego.
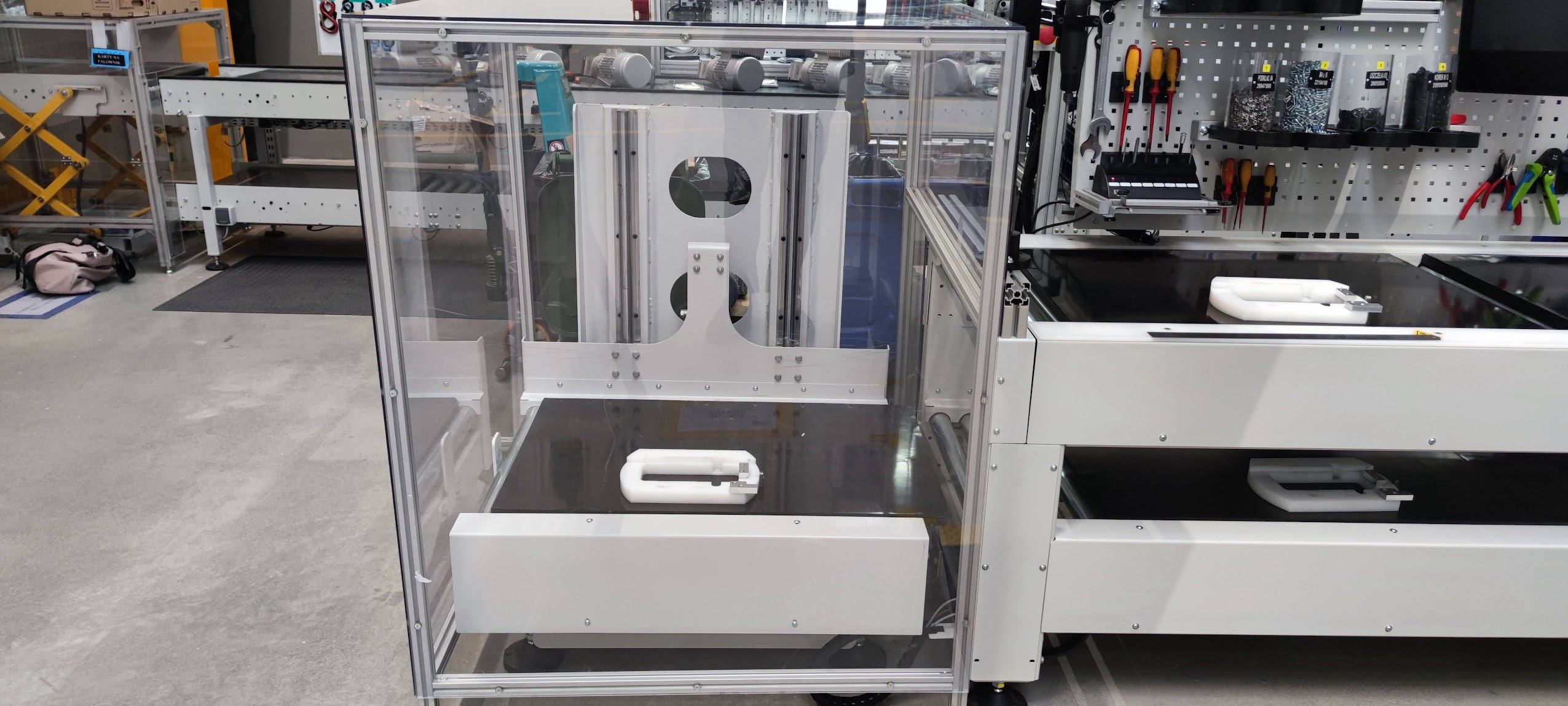
Projekt zakłada zaprojektowanie i budowę w pełni zautomatyzowanego stanowiska zrobotyzowanego przeznaczonego do przenoszenia odbiorników telewizyjnych z linii transportowej. Proces pobierania odbywa się w ruchu ciągłym, tzw. w locie, bez konieczności zatrzymywania podajnika.
Kluczowym elementem systemu są zaawansowane algorytmy synchronizacji, które umożliwiają robotowi precyzyjne zrównanie się z prędkością podajnika transportującego telewizory. Dzięki temu robot jest w stanie bezpiecznie i płynnie pobrać odbiornik w ruchu, eliminując konieczność przestojów i zwiększając wydajność linii produkcyjnej.
Zastosowany został specjalistyczny chwytak podciśnieniowy firmy Unigripper, oparty na modułach mat ssących, który zapewnia stabilne i pewne pobieranie odbiorników o zróżnicowanych gabarytach. System stale monitoruje parametry chwytania, w tym pozycję detalu oraz siłę ssania, co gwarantuje niezawodność i ochronę zarówno delikatnych ekranów telewizorów, jak i samego urządzenia.
W projekcie wykorzystano również zaawansowane algorytmy bezpieczeństwa, które czuwają nad prawidłową pracą systemu. Zapewniają one bezpieczną współpracę z operatorem oraz bezpieczne obchodzenie się z detalami, minimalizując ryzyko uszkodzenia produktów i zagrożeń dla personelu.
Modernizacja linii produkcyjnej składającej się z 3 pras mechanicznych wraz z automatycznym transportem detalu
W trakcie modernizacji zostały wykonane:
Realizacja projektu odbyła się na komponentach firm:
Stacja frezowania bloków styropianowych na potrzeby produkcji filmów realizowana w stolicy Australii- Canberze.
Do zbudowania stacji użyte zostały użyte komponenty firm SIEMENS, KUKA, HITECO,PIZZATO.
Za wygenerowanie ścieżek obróbczych dla robota KUKA odpowiedzialny był program „ENCY”.
Robot na tym stanowisku frezuje bloki styropianowe, zamontowane na stole obrotowym firmy KUKA, na określony kształt za pomocą elektrowrzeciona firmy HITECO oraz autorskiego chwytaka na którym zamontowany był drut oporowy do wstępnej obróbki. Dostępu do celi zrobotyzowanej strzegł zamek bezpieczeństwa PIZZATO. Logika stanowiska zrealizowana została na sterowniku SIEMENS S7-1200.
W tym projekcie nasza firma integrowała robota KUKA KR50 2100, który został wyposażony w 2 chwytaki SCHUNK PGN+P 125-1-AS. Robot miał za zadanie dostarczenie do maszyny FROMAG Koło zębatego w celu wykonania w nim rowka pod wpust. Dostarczenie kół przez operatora odbywałó się na zbudowanym przez nas stole taktującym wyposażonym w zsynchronizowane napędy firmy NORD. Po wyjęciu gotowego koła z maszyny przeciągającej robot wykonywał operację gratowania na stacji ze stacjonarną szlifierką.
Poza integracją robota dokonaliśmy modernizacji maszyny firmy FROMAG polegającej na wymianie starego sterowania na nowe zrealizowane przez sterownik SIEMENS S7-1200
Modernizacja linii produkcyjnej składającej się z 3 pras mechanicznych wraz z automatycznym transportem detalu
W trakcie modernizacji zostały wykonane:
Realizacja projektu odbyła się na komponentach firm:
Modernizacja maszyny do automatycznego zamykania kartonów przez robota YASKAWA.
Działania Firmy polegały na rozłączeniu stacji dwóch robotów na dwie pojedyncze dla zakładów naszego klienta z branży kosmetycznej.
Robot pobiera wieko kartonu z automatycznego magazynu i nakłada je w locie na jadący, wykonany przez nas podajnik, karton.
Stacja załadunku maszyny Fromag
W tym projekcie nasza firma integrowała robota KUKA KR50 2100, który został wyposażony w 2 chwytaki SCHUNK PGN+P 125-1-AS. Robot miał za zadanie dostarczenie do maszyny FROMAG Koło zębatego w celu wykonania w nim rowka pod wpust. Dostarczenie kół przez operatora odbywałó się na zbudowanym przez nas stole taktującym wyposażonym w zsynchronizowane napędy firmy NORD. Po wyjęciu gotowego koła z maszyny przeciągającej robot wykonywał operację gratowania na stacji ze stacjonarną szlifierką.
Poza integracją robota dokonaliśmy modernizacji maszyny firmy FROMAG polegającej na wymianie starego sterowania na nowe zrealizowane przez sterownik SIEMENS S7-1200
Stacja frezowania bloków styropianowych na potrzeby produkcji filmów realizowana w stolicy Australii- Canberze.
Do zbudowania stacji użyte zostały użyte komponenty firm SIEMENS, KUKA, HITECO,PIZZATO.
Za wygenerowanie ścieżek obróbczych dla robota KUKA odpowiedzialny był program „ENCY”.
Robot na tym stanowisku frezuje bloki styropianowe, zamontowane na stole obrotowym firmy KUKA, na określony kształt za pomocą elektrowrzeciona firmy HITECO oraz autorskiego chwytaka na którym zamontowany był drut oporowy do wstępnej obróbki. Dostępu do celi zrobotyzowanej strzegł zamek bezpieczeństwa PIZZATO. Logika stanowiska zrealizowana została na sterowniku SIEMENS S7-1200.
Projekt zakłada zaprojektowanie i budowę w pełni zautomatyzowanego stanowiska zrobotyzowanego przeznaczonego do przenoszenia odbiorników telewizyjnych z linii transportowej. Proces pobierania odbywa się w ruchu ciągłym, tzw. w locie, bez konieczności zatrzymywania podajnika.
Do zbudowania stacji użyte zostały użyte komponenty firm SIEMENS, KUKA, HITECO,PIZZATO.
Kluczowym elementem systemu są zaawansowane algorytmy synchronizacji, które umożliwiają robotowi precyzyjne zrównanie się z prędkością podajnika transportującego telewizory. Dzięki temu robot jest w stanie bezpiecznie i płynnie pobrać odbiornik w ruchu, eliminując konieczność przestojów i zwiększając wydajność linii produkcyjnej.
Zastosowany został specjalistyczny chwytak podciśnieniowy firmy Unigripper, oparty na modułach mat ssących, który zapewnia stabilne i pewne pobieranie odbiorników o zróżnicowanych gabarytach. System stale monitoruje parametry chwytania, w tym pozycję detalu oraz siłę ssania, co gwarantuje niezawodność i ochronę zarówno delikatnych ekranów telewizorów, jak i samego urządzenia.
W projekcie wykorzystano również zaawansowane algorytmy bezpieczeństwa, które czuwają nad prawidłową pracą systemu. Zapewniają one bezpieczną współpracę z operatorem oraz bezpieczne obchodzenie się z detalami, minimalizując ryzyko uszkodzenia produktów i zagrożeń dla personelu.
Projekt obejmuje zaprojektowanie i budowę w pełni zrobotyzowanego stanowiska przeznaczonego do automatycznego dokręcania śrub w elementach silników samochodowych. System oparty jest na współpracy robota przemysłowego FANUC z zaawansowanym układem wizyjnym i profesjonalnymi narzędziami montażowymi.
Kluczową rolę pełni system wizyjny firmy Cognex, który w czasie rzeczywistym wykrywa położenie śrub i analizuje ich dokładną lokalizację względem badanego detalu. Na podstawie tych informacji robot FANUC precyzyjnie dojeżdża do zidentyfikowanych punktów, co zapewnia powtarzalność i wysoką dokładność procesu.
Operacja wkręcania realizowana jest za pomocą nowoczesnych wkrętarek firmy Cleco, które gwarantują stabilną pracę oraz umożliwiają ścisłą kontrolę parametrów montażu. Każdy etap procesu dokręcania jest monitorowany – system rejestruje wartości momentu obrotowego i kąta dokręcenia, co pozwala na pełną weryfikację jakości połączenia śrubowego.
Modernizacja maszyny do automatycznego zamykania kartonów przez robota YASKAWA.
Działania Firmy polegały na rozłączeniu stacji dwóch robotów na dwie pojedyncze dla zakładów naszego klienta z branży kosmetycznej.
Robot pobiera wieko kartonu z automatycznego magazynu i nakłada je w locie na jadący, wykonany przez nas podajnik, karton.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}